Gyroscope + Accelerometer
I fixed up the PsyLink UI. It was so broken after the rewrite to Bluetooth Low Energy, I'm once again stunned that I got ANY useful results before. But now it receives the transmissions from the Arduino properly.
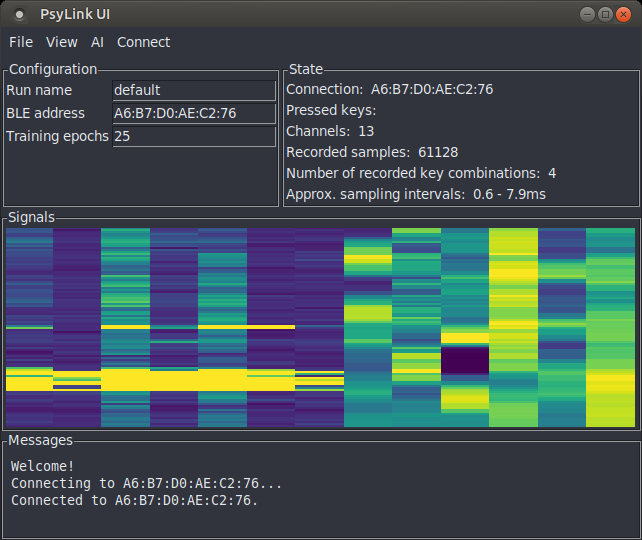
I also added 6 more signal channels: The x/y/z-axes from the Gyroscope and from the Accelerometer that are built in to the Arduino Nano 33 BLE Sense.
All put together finally allowed me to singlehandedly drive through the finish line of my favorite racing game F-Zero! \o/
- For training the AI, I recorded 60k samples over 2 minutes (500Hz)
- Trained for 5 epochs, which took 1 minute without GPU acceleration
- 4 training labels ("left", "right", "accelerate", "nothing")
- Final training and validation loss: 0.04, accuracy: 98%
- 6 layer neural network with 2 convolutional layers
- Music by Mitch Murder
- Newer post: Dedicated Website
- Older post: Wireless Prototype
- All posts on a single page
- Date: 2021-05-17
- Author: Roman