Back to the Roots
While uploading the old videos to the new PeerTube channel, I viewed the first video once again, which shows a pretty good signal from just two pieces of aluminum foil taped to the skin. And I wondered, why do I even bother with such a complicated set-up like in Prototype 4? It was really annoying to assemble, and the device is clunky and fragile.
Let's go back to the roots and build something more simple. Plenty of reasons:
- Having 8 small, distributed signal processing PCBs sounds nice at first, but it creates more points of failure. With Prototype 4, I had multiple instances where a connecting wire broke off, so this time I'd rather have everything on one PCB.
- What happened to the idea of processing the signal as little as possible and leaving the job to the neural network? Circuit 6 (whole device) amplifies certain information but hides other, like the DC voltage offset between electrodes.
- The electrode map of Prototype 4 provides me with signals (like "arm
turns left/right") which are redundant since I added support for the
inertial measurement unit (IMU).
- The signal from the IMU is actually way more reliable than what I'm getting from the electrodes, so why not ditch them completely? Well, there are some parts of the arm that move separately from the Arduino, mainly the fingers. So let's focus on these.
- My main issue with the early prototypes was the poor signal-to-noise ratio, but that was mainly due to the power line. This should be gone with a battery-powered device.
Circuit 7
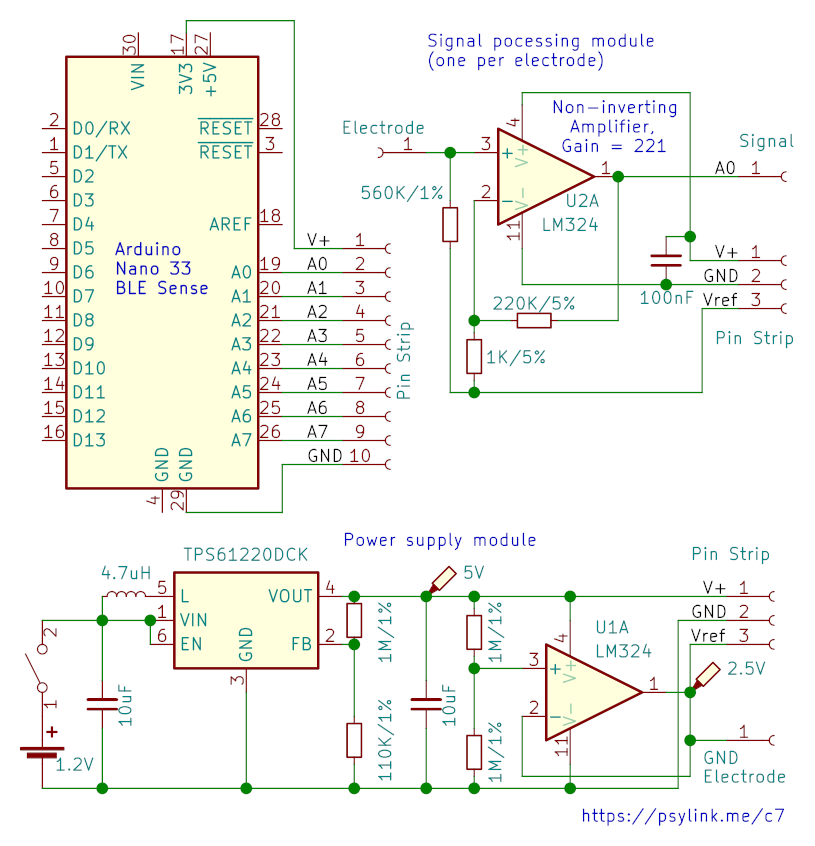
The Circuit 7 (whole device) shows a simplification of the signal processing module to a simple non-inverting amplifier per electrode with a gain of 221x. There's also a 560KΩ bias resistor towards Vref so the voltage we measure isn't too far off the center. In Circuit 6 (whole device) I had used 1MΩ, but here it produced mysterious oscillations, and going down to 560KΩ mysteriously fixed it.
{kind=link}
This circuit also features a rechargeable 1.2V AAA battery with a TPS61220 step-up converter boosting the voltage to 5V, because I don't hate nature, and I burned through enough CR2032 coin cells. Coin cells also aren't exactly optimized for currents of 20mA, and thus get drained too quickly.
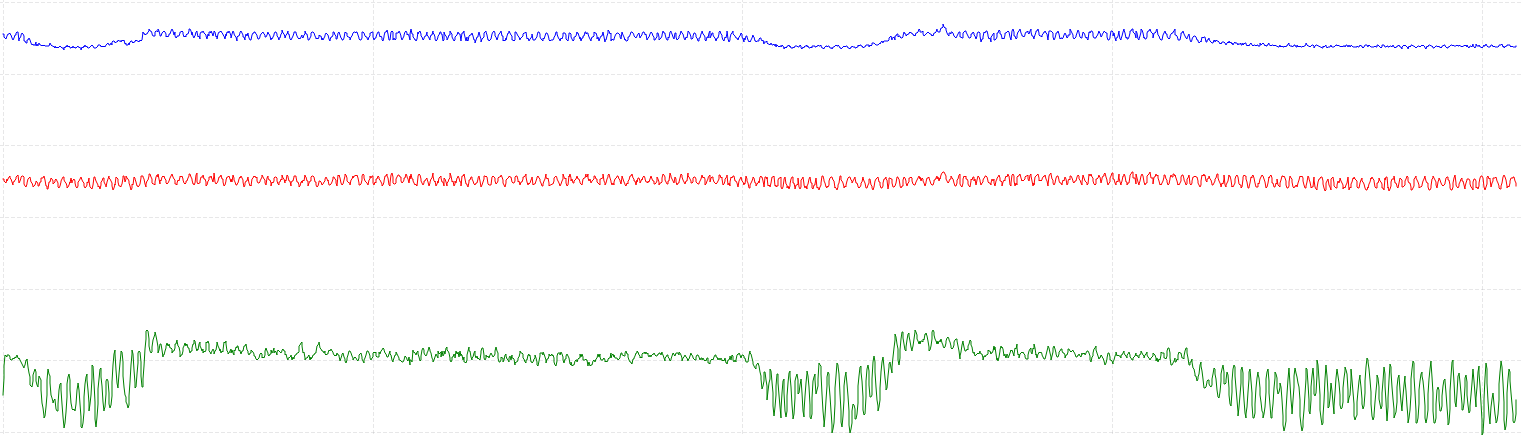
I measured a signal while pressing down a finger onto the table with two electrodes along the Flexor Digitorum Superficialis. Blue is electrode 1, red is electrode 2, and green is an amplified difference:
Circuit 8
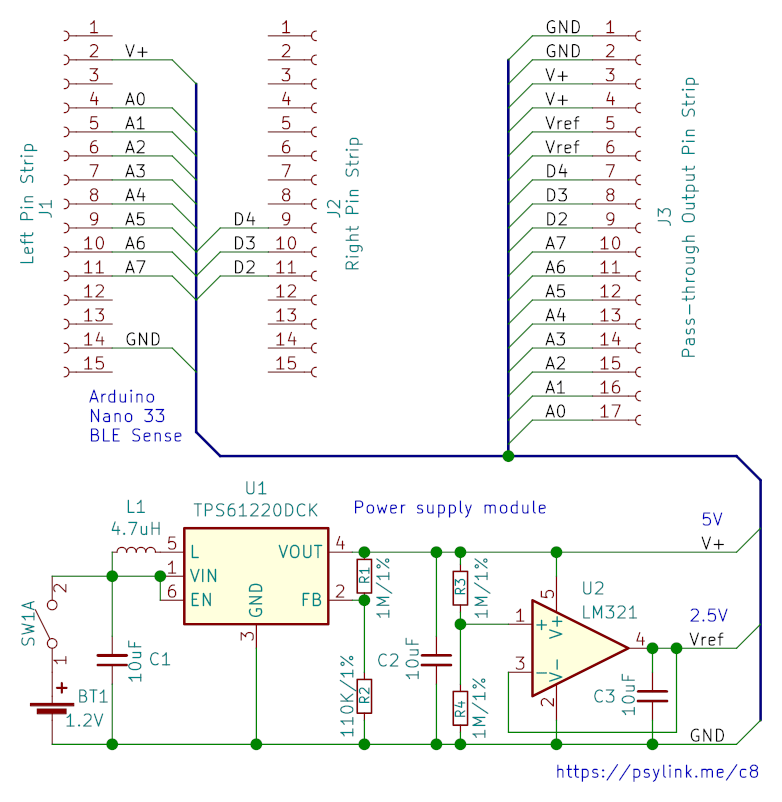
But let's cut even more out of this circuit. Here's one that is designed to be a shield to the Arduino Nano 33 BLE Sense, containing just the power supply, and an array of pass-through pins:
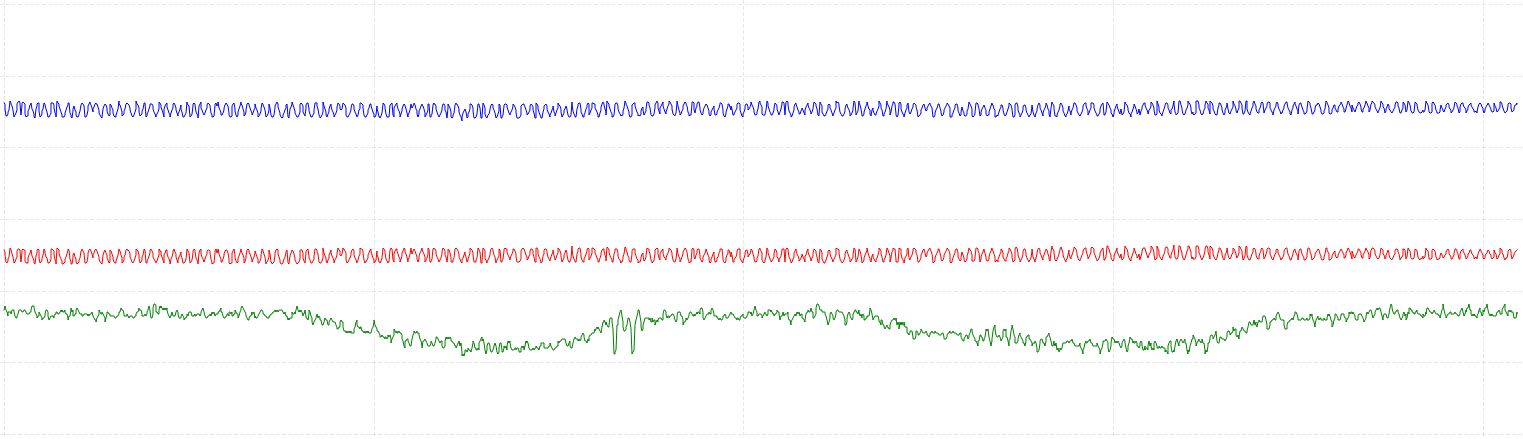
The signal that I'm getting is weaker, but certainly usable: (again, I measured a signal while pressing down a finger onto the table with two electrodes along the Flexor Digitorum Superficialis. Blue is electrode 1, red is electrode 2, and green is an amplified difference)
PCB
I also built a PCB that implements this power supply/pass-through shield, and I figured, even if the device ends up not very useful, I'll still be able to use this for experiments later on, thanks to the pass-through pins.
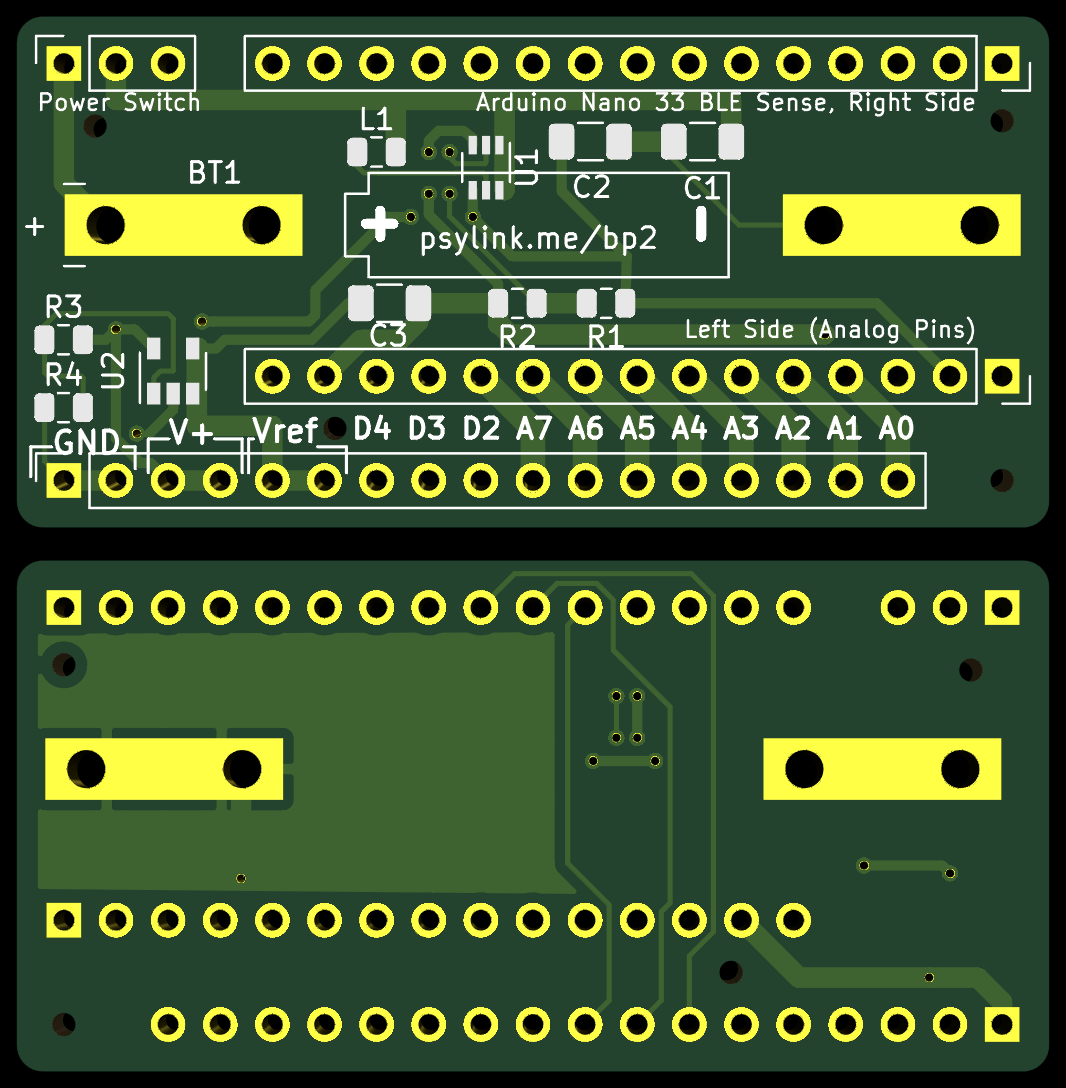
I just hope that the PCB/circuit will work at all. I still haven't figured out how to simulate it, and I don't really know the best practices for PCB design. The PCB footprint for the AAA battery clips (Keystone 82) is my first custom-made PCB footprint too. Hope it all works out.
Next Prototype
It will be a relatively small forearm band with 8 electrodes (+ 1 ground electrode), which I plan to place around the Flexor Digitorum Superficialis for detecting what individual fingers are doing. The information from the gyroscope + accelerometer should cover the rest.
- Newer post: Believe The Datasheet
- Older post: Website is Ready
- All posts on a single page
- Date: 2021-06-04
- Author: Roman