PsyLink is experimental hardware for reading muscle signals and using them to e.g. control the computer, recognize gestures, play video games, or simulate a keyboard. PsyLink is open source, sEMG-based, neural-network-powered, and can be obtained here.
This blog details the steps of building it and shows recent developments. Subscribe to new posts with any RSS reader, and join the community on the Matrix chatroom.
- All posts on one page
-
2024-08-16: Nine PsyLinks
-
2024-08-01: Android: First Step
-
2024-07-25: Rev2 Firmware
-
2024-07-24: Prototype Fund
-
2023-08-25: Data Sheets
-
2023-05-31: Prototype 10
-
2023-03-22: Enhanced Signal by >1000%
-
2023-03-06: Sample Signals
-
2023-02-05: 2022 Retrospective
-
2022-02-24: Added Bills of Materials
-
2022-02-23: 3M Red Dot electrodes
-
2022-02-22: Microchip 6N11-100
-
2022-02-16: Next Steps & Resources
-
2022-02-15: Mass production
-
2022-01-19: Prototype 9 + Matrix Chatroom
-
2022-01-18: HackChat & Hackaday Article
-
2021-12-19: Prototype 8 Demo Video
-
2021-12-18: Prototype 8
-
2021-12-16: INA155 Instrumentation …
-
2021-12-15: Power Module 4
-
2021-11-30: Batch Update
-
2021-07-17: Neurofeedback: Training in …
-
2021-07-06: New Frontpage + Logo
-
2021-06-24: Cyber Wristband of Telepathy …
-
2021-06-21: Running on AAA battery
-
2021-06-16: Power Module 3
-
2021-06-10: Believe The Datasheet
-
2021-06-04: Back to the Roots
-
2021-05-31: Website is Ready
-
2021-05-29: Dedicated Website
-
2021-05-17: Gyroscope + Accelerometer
-
2021-05-14: Wireless Prototype
-
2021-05-09: Power Supply Module
-
2021-05-07: New Name
-
2021-05-06: Finished new UI
-
2021-05-04: Higher Bandwidth, new UI
-
2021-04-30: PCB Time
-
2021-04-29: Soldering the Processing Units
-
2021-04-28: Going Wireless
-
2021-04-24: First Amplifier Circuit
-
2021-04-19: Amplifiers
-
2021-04-15: Multiplexers
-
2021-04-14: Data Cleaning
-
2021-04-13: Cyber Gauntlet +1
-
2021-04-11: Adding some AI
-
2021-04-09: F-Zero
-
2021-04-08: Baby Steps
-
2021-04-03: The Idea
F-Zero
└2021-04-09, by RomanThe look of the first device was way too unprofessional, so I pulled out my sewing machine and made a custom tailored sleeve from comfortable modal fabric.
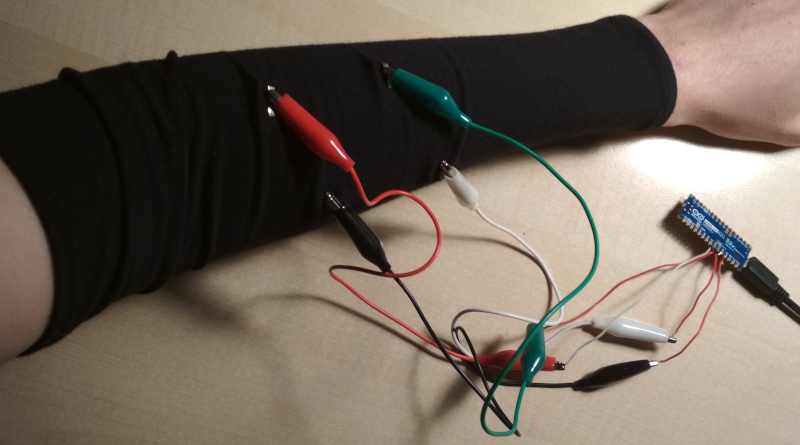
On the inside, I attached some recycled studs that served as electrodes. Who needs that expensive stuff they sell as electrodes when a piece of iron suffices?
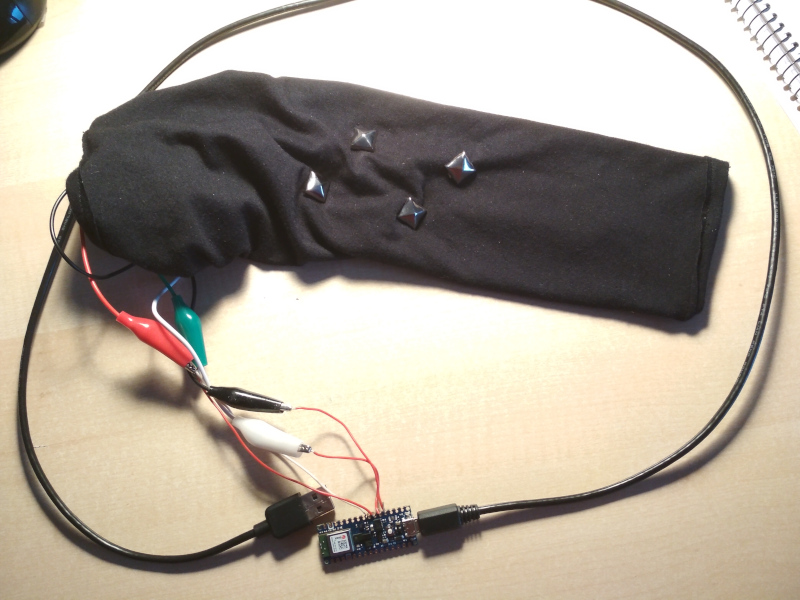
This time it had 4 electrodes. I targeted the middle and the distal end of two muscles, the Brachioradialis and the Extensor carpi radialis longus. I picked those muscles at random, because I honestly don't know what the fuck I am doing.
Software-wise, I played around with moving average and got reasonable signals, but it was clear that there was too much noise.
How to filter, though? I'm not going to solder some bandpass filter, that's too slow and inflexible. There are simple algorithms for doing it in software (link 1, link 2), but something seemed off about this method. In the end, I decided to learn how to do a Fourier transform on the Arduino.
With this code (inspired by this post), I took 64 samples at a sampling rate of 1kHz, performed the Fourier transform, cut out anything under 30% and over 50% of my frequency range, and then summed up the amplitudes of the remaining frequencies to generate the output.
Still very crude, but it allowed me to get distinctive signal patterns for various positions of my arm:

I was genuinely surprised that I got information of this fidelity and usefulness from just hooking up 4 ADC's to semi random places of my forearm and a software bandpass filter. This was good enough to use it as a basic input device!
I wondered, can I control a racing car game with this?
To test that, I built this program to read out the signals and convert certain ranges of values to keyboard presses of the keys Left and Right. The value ranges need to be calibrated before each use: I held my left arm like I'm grabbing an invisible steering wheel, moved it left and right, and looked hard at the signal values to find correlations like "signal A is always below X if and only if I steer left". Once the calibration is done, the invisible steering wheel turned into a magical keyboard with 2 keys =D
Right away I tried it out to steer in my favorite racing game, F-Zero:
Note that in addition to the steering wheel, I used my other hand to accelerate.
I loved it, but there is still a lot of work to be done. The calibration is a pain, especially since it needs to be repeated if the electrodes move too much, which happens a lot with this kind of sleeve. Also I want more electrodes, better signal processing, and data transfer via Bluetooth so I can run it off a battery.
Baby Steps
└2021-04-08, by RomanThe Arduino arrived. I have no electrodes though. But what are electrodes, just some pieces of metal taped to your skin, right? Let's improvise that:

There are two pieces of aluminum foil taped to my skin, held together with blue medical wrap.
The educational material about electromyographs that I've seen described a chain of hardware elements to process and clean up the signal:
- amplification
- filtering
- rectification
- antialiasing
- smoothing
- averaging
- etc.
But I thought, let's focus on the MVP. Why not simply hook the electrodes straight to the analog input pins of the Arduino with some alligator clamps? Worked fine. I did minimal signal processing in software though, you can find the source code here.
This video shows the myoelectric signal on Arduino IDE's built-in signal plotter:
The Idea
└2021-04-03, by RomanOn this day, I got the idea and started researching EMG design and signal processing, motor neurology basics, as well as existing projects.
Soon I realized that I will need a microcontroller to record and process the signals. I considered the Raspberry Pi Pico and Arduino Nano 33 BLE Sense, and chose the Arduino because:
- Bluetooth
- More analog-to-digital converter inputs
- TensorFlow Lite support, which would allow me to leverage neural networks for signal processing. This is a bit of a stretch, can't wait to get disappointed by this :)
I wish there was a decent battery/UPS shield, couldn't find one so far.